





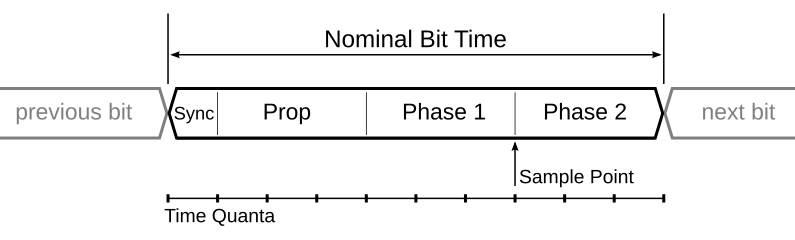
Bit timing in CAN is all about ensuring that every node on the network can correctly interpret the bits being transmitted. This synchronization is crucial for maintaining the integrity and efficiency of data communication. Bit Segmentation Each bit in a CAN frame is divided into several segments: Synchronization Segment (Sync_Seg): This is the part where the actual synchronization occurs. It’s always one-time quantum (TQ) long and helps align the clocks of all nodes on the network. Propagation Segment (Prop_Seg): This segment compensates for the physical delay in signal propagation across the network. Phase Segment 1 (Phase_Seg1): This is used to compensate for edge phase errors by lengthening the bit time if necessary. Phase Segment 2 (Phase_Seg2): Similar to Phase_Seg1, but it shortens the bit time if necessary. Each of these segments is made up of a certain number of time quanta (TQ), which are the smallest time units in a CAN network. Sample Point The sample point is a critical point within the bit where the bus level is read and interpreted as a logical value. Here’s why it’s so important: Accurate Bit Reading: The sample point is where the CAN controller reads the bit value. It is crucial to set the sample point accurately to minimize errors due to signal noise or other disturbances on the bus. Preferred Value: Typically set at 87.5% of the bit time, this value is preferred by protocols like CANopen and DeviceNet. This means that the bit is sampled after 87.5% of its duration has passed. Adjustable Range: The sample point can vary from 50% to 90% of the bit time, allowing flexibility depending on the network requirements and conditions. For example, ARINC 825 uses a default value of 75%. Noise Minimization: Setting the sample point correctly helps in minimizing the impact of signal noise. Sampling too early or too late can lead to incorrect bit interpretation, especially in noisy environments. Understanding Bit Rate and Bit Timing Bit Rate The bit rate in CAN communication refers to the speed at which data is transmitted over the CAN bus, typically measured in bits per second (bps). The bit rate is a crucial parameter because it determines how quickly data can be sent and received between nodes on the network. Common bit rates in CAN systems include 125 kbps, 250 kbps, and 500 kbps, with some systems operating at even higher speeds, such as 1 Mbps. Bit Timing Bit timing in CAN communication is the precise control of the duration and positioning of each bit transmitted on the bus. Proper bit timing ensures that all nodes on the network sample the bits at the same point, leading to accurate and synchronized data transmission. Bit timing is divided into several segments within each bit time, which collectively ensure robust and reliable communication. How Bit Timing Ensures Synchronization To maintain synchronization, the CAN controller can adjust the length of a bit by an integral number of time quanta (TQ). The maximum value of these adjustments is termed the Synchronization Jump Width (SJW). Hard Synchronization: Occurs on the recessive-to-dominant transition of the start bit. The bit time is restarted from this edge. Resynchronization: Occurs when a bit edge doesn’t occur within the Sync_Seg in a message. One of the Phase Segments is shortened or lengthened, depending on the phase error, up to the SJW. Factors Affecting Bit Rate Four primary factors influence the CAN bit rate: Oscillator Tolerance: Variations in the oscillator frequency can affect the timing accuracy. High-precision oscillators are essential for maintaining a stable bit rate. Propagation Delay: The physical length and quality of the CAN bus can introduce delays. Prop_Seg is adjusted to compensate for these delays. Network Load: Heavy network traffic can lead to delays and timing issues. Proper network design and bit timing configuration help mitigate these problems. Bus Length: Longer bus lengths introduce more propagation delay, requiring adjustments in the Prop_Seg to maintain synchronization. Prescaler Division The prescaler is used to divide the clock frequency to generate the required clock frequency for CAN. For example, if the clock frequency is 48 MHz and we need an 8MHz CAN clock, the prescaler value would be 6. How the Prescaler Division Works Clock Frequency: The original clock frequency provided by the oscillator. Prescaler Value: The value by which the original clock frequency is divided to achieve the desired CAN Clock Frequency. IMPORTANT The CAN system clock is chosen so that the desired CAN bus Nominal Bit Time (NBT) is an integer number of time quanta (CAN system clock periods) from 8 to 25. Time Quanta Definition: The time quantum (tQ) is the basic time unit in CAN bit timing. It is derived from the CAN system clock divided by the prescaler. Calculation: For example, if the CAN system clock is 48 MHz and the prescaler is set to 6, then: Nominal Bit Time (NBT) Definition: The Nominal Bit Time (NBT) is the total duration of a single CAN bit, measured in time quanta (tQ). It is the sum of the time segments within a bit period: Sync_Seg, Prop_Seg, Phase_Seg1, and Phase_Seg2. Components: Sync_Seg: The synchronization segment, always 1 tQ. Prop_Seg: The propagation delay segment, compensates for the signal propagation delay. Phase_Seg1: The first phase segment, can be adjusted to resynchronize the clock. Phase_Seg2: The second phase segment, also adjustable for resynchronization. Calculation: Practical Example of Bit Timing Calculation For calculating Bit Time and Segmentation, some important parameters are taken into account before starting the calculation. Parameters: Bit rate MCU Clock/Oscillator Frequency Bus length Bus propagation delay Propagation delay of TxD plus RxD offered by CAN Transceiver But, usually, values like total propagation delay offered by CAN transceiver, Bus length, and Bus propagation delay, are pre-defined values in their hardware datasheet. Question: Conclusion Understanding CAN bit timing and how the bit rate is adjusted is crucial for ensuring reliable communication in a CAN network. By properly configuring the timing parameters and taking into account factors like oscillator tolerance, propagation delay, network load, and bus length,
Table of Contents Why Was the CAN Protocol Introduced? Let’s start from the basics: why did we need the CAN protocol in the first place? Imagine the electronics in a car before CAN was introduced. Each part of the car’s electronics had to be directly wired to every other part it needed to communicate with. This point-to-point wiring system had some big problems: Too Many Wires: As cars got more advanced, they needed more electronic control units (ECUs) to handle all the new features. Each new feature meant adding more wires, making the system very complicated and heavy. High Costs: More wires didn’t just mean more complexity; it also meant higher costs. Building and maintaining such a complicated wiring system was expensive, and finding and fixing problems in all those wires took a lot of time and money. Hard to Expand: Want to add a new feature to the car? That meant even more wires and changes to the existing setup, which was a real headache. The system wasn’t built to easily handle new additions. Interference Problems: With so many wires, there was a lot of electromagnetic interference (EMI). This interference could mess up the signals being sent through the wires, making the whole system less reliable. Explaining the CAN Protocol The Controller Area Network (CAN) is a robust protocol for connecting electronic control units (ECUs) in vehicles and other distributed systems. CAN was introduced to address the need for a more efficient, reliable, and flexible communication system in automotive applications. Let us explore how CAN works, starting with its fundamental layers. The Physical Layer of CAN The physical layer of CAN consists of a two-wire bus system called CAN_H (high) and CAN_L (low). Data is transmitted differentially, meaning the voltage difference between the two wires represents the actual data. This approach provides excellent resistance to noise and interference, ensuring reliable communication among all nodes on the network. Data Link Layer in CAN The data link layer is responsible for managing the data exchange between nodes on the CAN network. It consists of several key functions: Framing: CAN frames consist of several fields, including the identifier, control, data, CRC, ACK, and end of frame. These fields structure the data and control information for transmission. Addressing: Instead of traditional addresses, CAN uses message identifiers for addressing. Each message has a unique identifier that determines its priority and relevance to nodes on the network. Error Detection: CAN employs multiple error detection mechanisms, such as the Cyclic Redundancy Check (CRC), acknowledgment checks, and form checks. If an error is detected, the erroneous message is discarded, and an error frame is transmitted. Arbitration: When multiple nodes attempt to send messages simultaneously, CAN uses a non-destructive bitwise arbitration process. The message with the highest priority (lowest identifier value) wins the arbitration and continues transmission, while others wait for the next opportunity. Importance of Synchronization Synchronization is critical for the correct operation of the CAN network. To achieve this, all nodes synchronize their clocks at the start of each message transmission and continuously resynchronize throughout the message. This synchronization ensures that all nodes interpret the bit timings accurately and maintain a consistent understanding of the message. Hard synchronization occurs at the beginning of every message. When a node receives the start bit, which is indicated by a transition from recessive to dominant, it aligns its clock with that transition. Resynchronization happens throughout the entire message. As the message is being sent, nodes continually adjust their clocks based on the expected bit timings. If a node detects that a bit transition occurred earlier or later than expected, it adjusts its internal clock to stay in sync with the others. Exploring the Versions of CAN Protocol The Controller Area Network (CAN) protocol has evolved over time, leading to various versions, each offering enhancements over its predecessors. Here, we’ll overview the different CAN versions, with a primary focus on CAN 2.0. Versions of the CAN Protocol 1. CAN 2.0A (Standard CAN) Identifier Length: 11 bits Message Size: Up to 2,048 unique message IDs Data Speed: Typically up to 1 Mbps Features: Standard data frames and error detection mechanism. 2. CAN 2.0B (Extended CAN) Identifier Length: 29 bits Message Size: Up to 536 million unique message IDs Data Speed: Typically up to 1 Mbps Features: Extended identifier field for more complex applications. 3. CAN FD (Flexible Data Rate) Enhanced Data Rate: Supports faster data transmission rates, up to 8 Mbps Data Length: Up to 64 bytes of data per frame Features: Flexible data rate and extended data field for more efficient communication. 4. CAN XL Higher Bandwidth: Supports even faster data rates, exceeding 10 Mbps. Extended Data Length: Capable of handling larger amounts of data Features: Improved protocol efficiency and higher performance for demanding applications Focus on CAN 2.0 While all versions of CAN offer unique advantages, our primary focus will be on CAN 2.0, the foundation of the CAN protocol. CAN 2.0A (Standard CAN) CAN 2.0A FRAME STRUCTURE OVERVIEW 1. Arbitration Field The Arbitration Field is crucial for determining the priority of the message during arbitration: SOF(Start of Frame); 1 bit Determines the starting Identifier: 11 bits Uniquely identifies the message. Lower values have higher priority. RTR (Remote Transmission Request): 1 bit Indicates if the frame is a data frame (0) or a remote frame (1) requesting data. 2. Control Field Reserved bit: 2 bits DLC (Data Length Code): 4 bits Specifies the number of data bytes (0 to 8) in the Data Field. This allows the receiver to know how many bytes to expect. 3. Data Field Data Field: 0 to 8 bytes Contains the message content. 4. CRC Field CRC (Cyclic Redundancy Check): 15 bits For error checking of the Data Field. CRC Delimiter: 1 bit (recessive). 5. Acknowledgment Field ACK Slot: 1 bit (dominant if the frame is received correctly). ACK Delimiter: 1 bit (recessive). 6. End of Frame End of Frame: 7 bits (recessive). 7. Interframe Space Interframe Space: Variable recessive bits. Interframe Space and

How does CAN Peripheral in Microcontroller work? In this blog get to know important concept of how CAN protocol is implemented in Microcontrollers
What is USB Technology USB is a technology which standardize the connection of peripherals to personal computers. It has largely replaced interfaces such as PS/2 connector (used for keyboard), ADB Connector (used for mouse), Parallel Ports (used for printers) and Game ports (used for video game consoles) which are used to connect different devices to computers. USB technology made it possible to connect all such different devices to computer via single port USB port. How Does USB does that: USB is a bus protocol in which our computer is USB MASTER and devices connected to it are termed as USB DEVICES. USB DEVICES Can be anything: keyboard, mouse, flash drives, hard disk, Audio Devices, Card Readers and all devices you can think of which are connected to USB. Now in USB protocol there is the concept of USB descriptor via whichUSB host that is computer can determine which USB device is connected and correspondingly detect which electronic device is it. The USB is specified to be an industry-standard extension to the PC architecture with a focus on PC peripherals that enable consumer and business applications. What is USB technology Architecture? USB hosts are also known as master devices, and they initiate all the communication that occurs over the USB bus. Typically, a computer or other controller is considered to be the master, only responding to other devices if requesting certain information. The peripheral device(USB Device), or the slave device, is connected to the host device, and is programmed to provide the host device with the information it needs to operate. Typically, peripheral devices include USB flash drives, computer mice and keyboards, cameras, and other such devices. There can be multiple USB devices but only one USB master would be there. The USB system uses the tiered star topology, in which 127 different USB slaves can be connected on the same USB bus. What Are USB Packets? The amount of data transmitted in USB is called ‘packet’. The data transfer that can occur within the USB protocol is discussed below. The data of the USB protocol is transmitted within packets LSB first. There are mainly four types of USB packets: Token packet Data packet Handshake packet Start of the Frame packet Data exchange between the host and device is known as USB transactions. One can think of USB transactions as complete data exchange that occurs between a host and device where all necessary packets are transmitted. Each USB transaction is composed of either 2 or 3 packets, depending on the transfer type being used. Each USB packet is designed from various fields like a Sync field, a Packet ID (PID) field, ADDR (Address) field, ENDP (Endpoint) field, CRC (cyclic redundancy check) field, and EOP (end of packet) field.  USB Packet Field Description Sync (8 or 32 bits): In USB protocol, every USB packet will begin with a SYNC field which is normally utilized to synchronize the transmitter & the receiver to transmit the data precisely. This field is long with 8 bits at high & low speed otherwise 32-bits long for maximum speed & it is utilized to synchronize the CLOCK of the transmitter & receiver. The final 2-bits will indicate wherever the PID field begins. PID(8 bits): The packer identifier field within the USB protocol is mainly used to recognize the packet type that is being transmitted. The length of this field is 8 bits long where the upper 4- bits recognize the kind of packet & lower 4- bits are the bitwise complement of the upper 4- bits. The resulting format of the PID(Packet identifier field) is shown below → → The PID Value: Indicates the type of packet/group( out of 4 one) and the format of the packet and the type of error detection applied to the packet. → PIDs are divided into four coding groups: token, data, handshake, and special, with the first two transmitted PID bits (PID<0:1>) indicating which group. Address field(7 bits): The address field of the USB protocol indicates which packet device is mainly designated for. The 7-bits length simply allows support of 127 devices. The ADDR field is specified for IN, SETUP, and OUT tokens and the PING and SPLIT special token. The address (ADDR) field specifies the address, that is either the source or destination of a data packet, depending on the value of the token PID. Endpoint Field(4 bits):An additional four-bit endpoint (ENDP) field, shown in Figure 8-3, permits more flexible addressing of functions in which more than one endpoint is required. The endpoint field is defined for IN, SETUP, and OUT tokens and the PING special token. Cyclic Redundancy Checks: Cyclic redundancy checks (CRCs) are used to protect all non-PID fields in token and data packets. In this context, these fields are considered to be protected fields.All CRCs are generated over their respective fields in the transmitter before bit stuffing is performed. Similarly, CRCs are decoded in the receiver after stuffed bits have been removed. Data Field: The data field may range from zero to 1,024 bytes and must be an integral number of bytes. Figure 8-4 shows the format for multiple bytes. Data packet size varies with the transfer type. Types of USB Packets 1. Token Packet: A token consists of a PID, specifying either IN, OUT, or SETUP packet type and ADDR and ENDP fields. The PING special token packet also has the same fields as a token packet. Token Packet is initiated by the host and determines if the host will send or receive data. For OUT and SETUP transactions, the address and endpoint fields uniquely identify the endpoint that will receive the subsequent Data packet. Setup – Used to begin control transfers. Out – Informs the USB device that the host wishes to send information. For IN transactions, these fields uniquely identify which endpoint should transmit a Data packet. For PING transactions, these fields uniquely identify which endpoint will respond with a handshake packet. An IN PID defines a Data transaction from a device to the host. OUT