
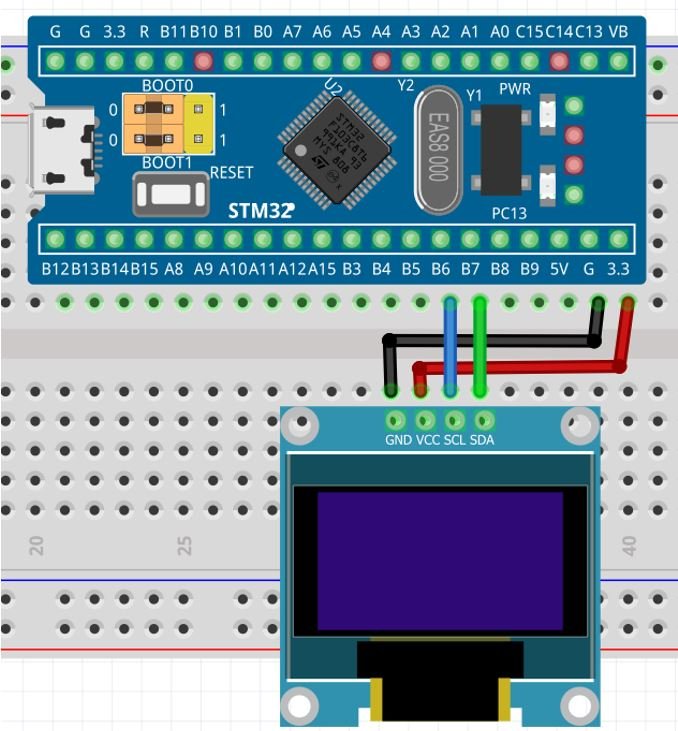
The I2C devices are recognized by their slave addresses and the format of their address is as follows
SA0 – Provides 2 slave address option to choose from
R/W bit – This bit is to specify the I2C read or write of the operation 1 for read operation 0 for write operation .

For write the I2C address is as follows 0x78
For read the I2C address is as follows 0x79
This function is used to set the X and Y coordinates of display and specifies the point where data is to be displayed .
The function takes in 2 16 bit arguments which are then passed into the variable of the structure SSD1306 , CurrentX and CurrentY
This char type function takes in the pointer of the string , font of the string or char to be displayed and the color of the LCD which is a enumeration having 2 values white and black
This function pushes character by character using the function Putc until the last character is reached and returns the string in the end
Also font in which the text is to be displayed is chosen using the font.c library
This char type function takes in 3 arguments the character of the input string , the font from fonts.c library and the color of the OLED
The function checks if there is space available on the pixel on which the user wants put the data and returns error in case of a collision
Next the size of the font chosen is determined and using the draw pixel function both the X and Y coordinates are updated and in the end the pointer is updated to go through the next character and the previous character is returned.
The Draw pixel function takes in 2, 16 bit X, Y values as arguments .
Next the function checks if the entered values are greater than the width and height of the OLED. The function also checks if the pixels are inverted .
Next the X and Y location are put in the SSD1306_buffer which is a static function
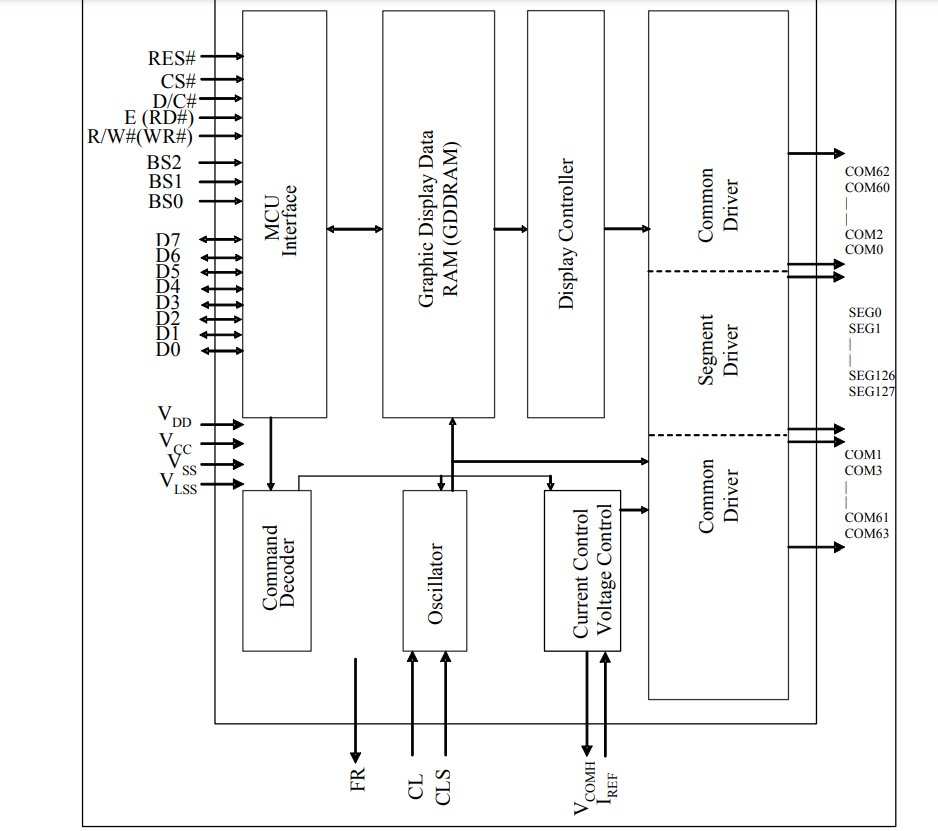
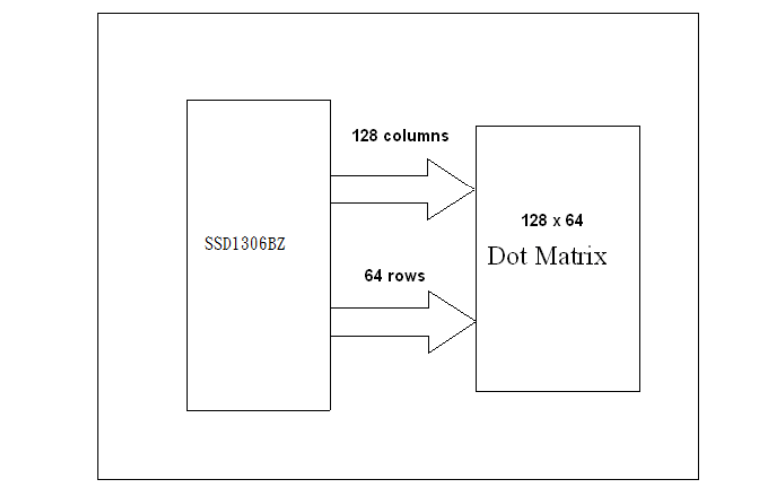
In this function the SSD1306 is initialized using various parameters . The write command for opening the display is sent , next the memory addressing mode is set following which the addressing mode horizontal , vertical , page is set . Next the page start address is set , scan direction of the COM output is set , the start line address is also specified , the remapping of the segment is mapped to 0-127, next the clock divide ratio is set and finally SSD1306 is turned on.
This function is used write data to a single device with the address being defined . The register to which data is to be written is specified and is transmitted using HAL_I2C_Master_Transmit(&hi2c1, address, dt, 2, 10); function
This function is used to write multiple slave devices and the count is updated every time the next device is to be selected.
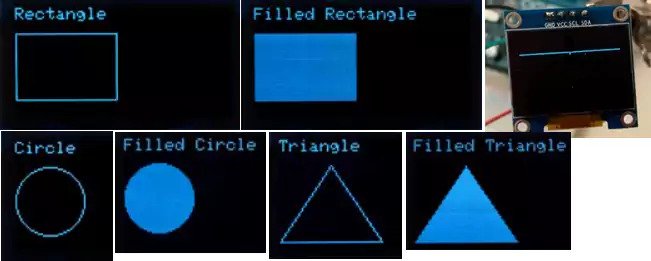
This function is used to draw a line on the display , which initially checks if overflow condition is reached or not, next after displaying the dot on every pixel the X , Y coordinates are updated after checking if the line is a horizontal line or vertical line and the iteration is done until the coordinate X1 , Y1 is reached
This function is used to draw a rectangle on the display using the starting position as mentioned in X , Y coordinates and width w and height h . Using these 4 variables the draw line function is called 4 times .
This function is used to draw triangle using the drawline function and calling it each time for starting and ending coordinates of the line which are (x1, y1), (x2,y2) and (x3, y3) .
This function takes in input x0 , y0 as the starting coordinates of the circle and after calling the draw pixel function and using the radius as the argument the circle is drawn.