



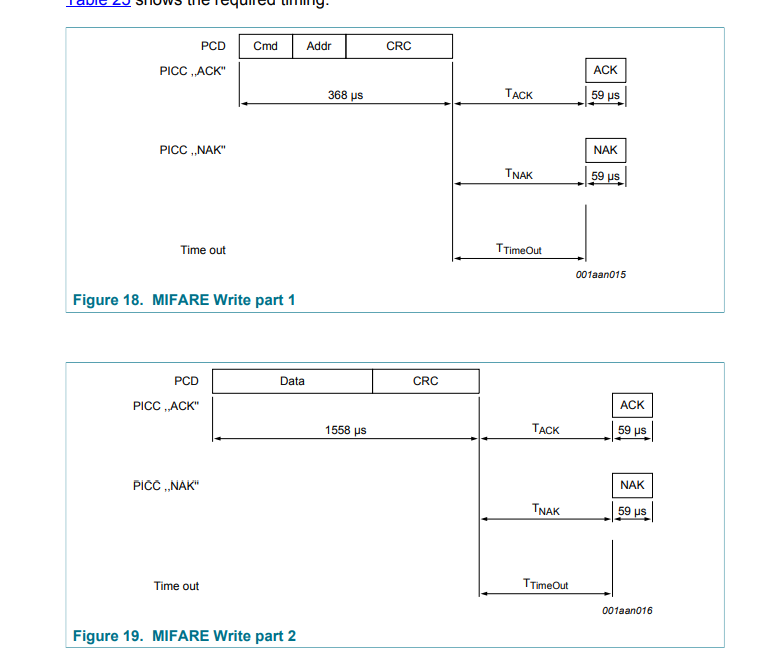
This function takes in 2 arguments the address to which the data has to be written and the array or buffer in which data is stored lets say this to be writedata array.
A 8 bit array of 18 length is also intialized to store data which will be transferred to the memory block.
Intially CRC is checked using CalculateCRC function using which takes in 3 arguments array in ( whose first 2 values are PICC Write and blockAddress ), len and output array that stores 2 values CRCResultRegL , CRCResultRegM .
Next MFRC522_ToCard function is called which takes in 5 arguments command (in this case that will be PCD_Transceive), send data , send length , back length, back data according to various commands processing is done and according to switch cases status is sent
Finally MFRC522_ToCard in again called (with PCD_Transceive) and the data is transferred to the FIFODataReg to return with the correct status and finally the PCD is set to idle
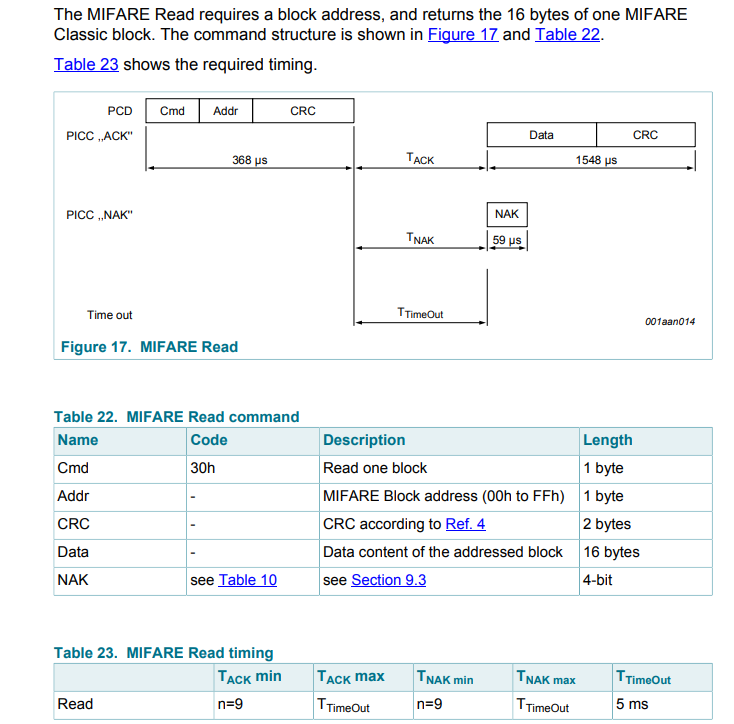
This function is used to read data from a memory block and and put it into a buffer or array hence the argument recvData
Similar to uint8_t MFRC522_Write initially the CRC is calculated and MFRC522_ToCard is called.
In MFRC522_ToCard the command argument is set to PCD_TRANSCEIVE due to which the code enter the for loop in which the data that was in FIFODataReg is populated in the recvData Buffer.
Finally MFRC522_ToCard in again called (with PCD_Transceive) and the data is transferred to the FIFODataReg to return with the correct status and finally the PCD is set to idle
This function is used to control the MFRC522 according to the command arguments that can be
- PCD_AUTHENT
- PCD_TRANSCEIVE
Both these commands have different irqEn ,waitIRq that are written into CommIEnReg block which is then cleared using clear bit mask function
After finally setting bit mask the PCD is set to idle state
The function writes the data in FIFODataReg to the backData buffer and returns the status which is OK in case of no errors
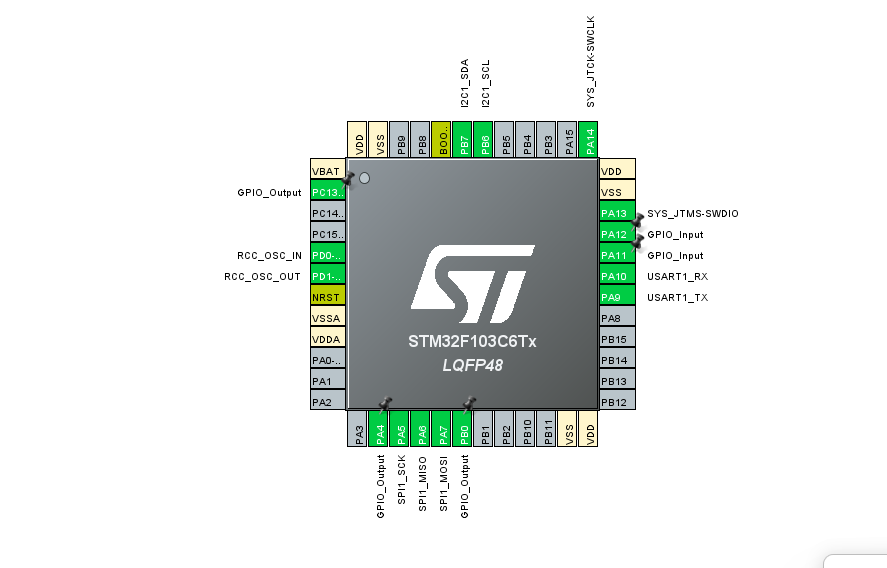
FIG 1- PINOUT CONFIGURATION
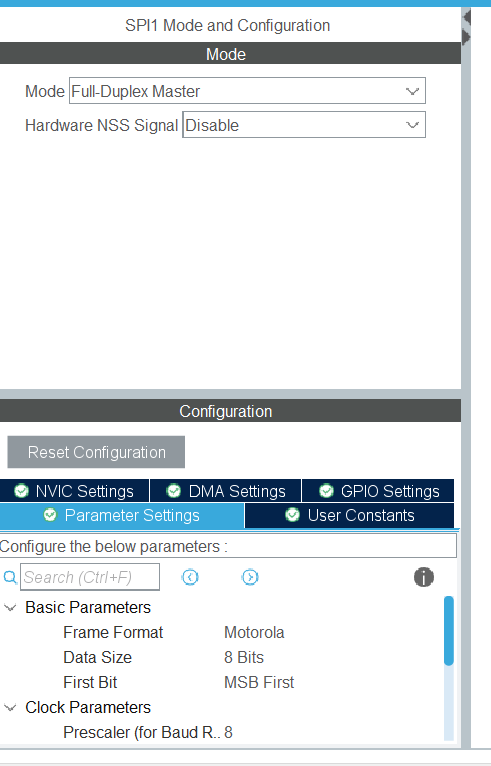
FIG 2 – CONFIGURING THE SPI1 PERIPHERAL