
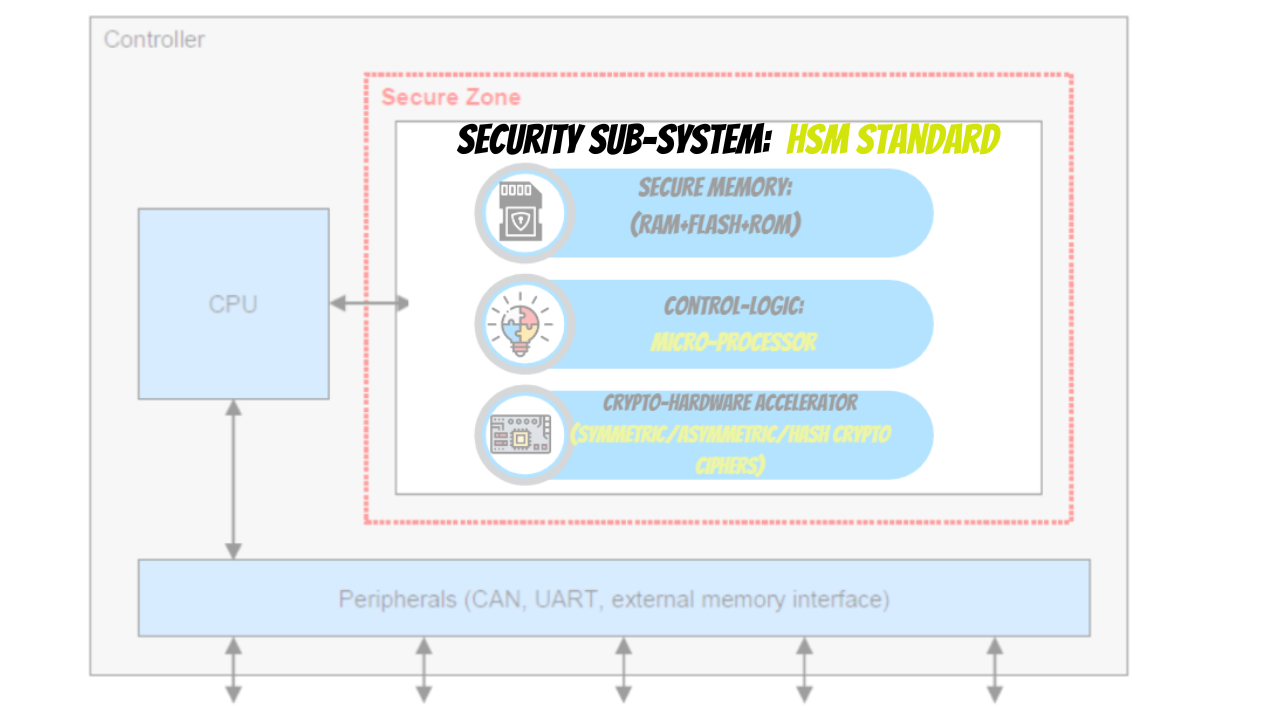
Learn About Advance Cryptography Peripheral in Microcontrollers: The HSM Peripheral (Hardware Security Module)
Now in This blog, we are going to dip deeper into different electronics sub-systems in an automotive vehicle.
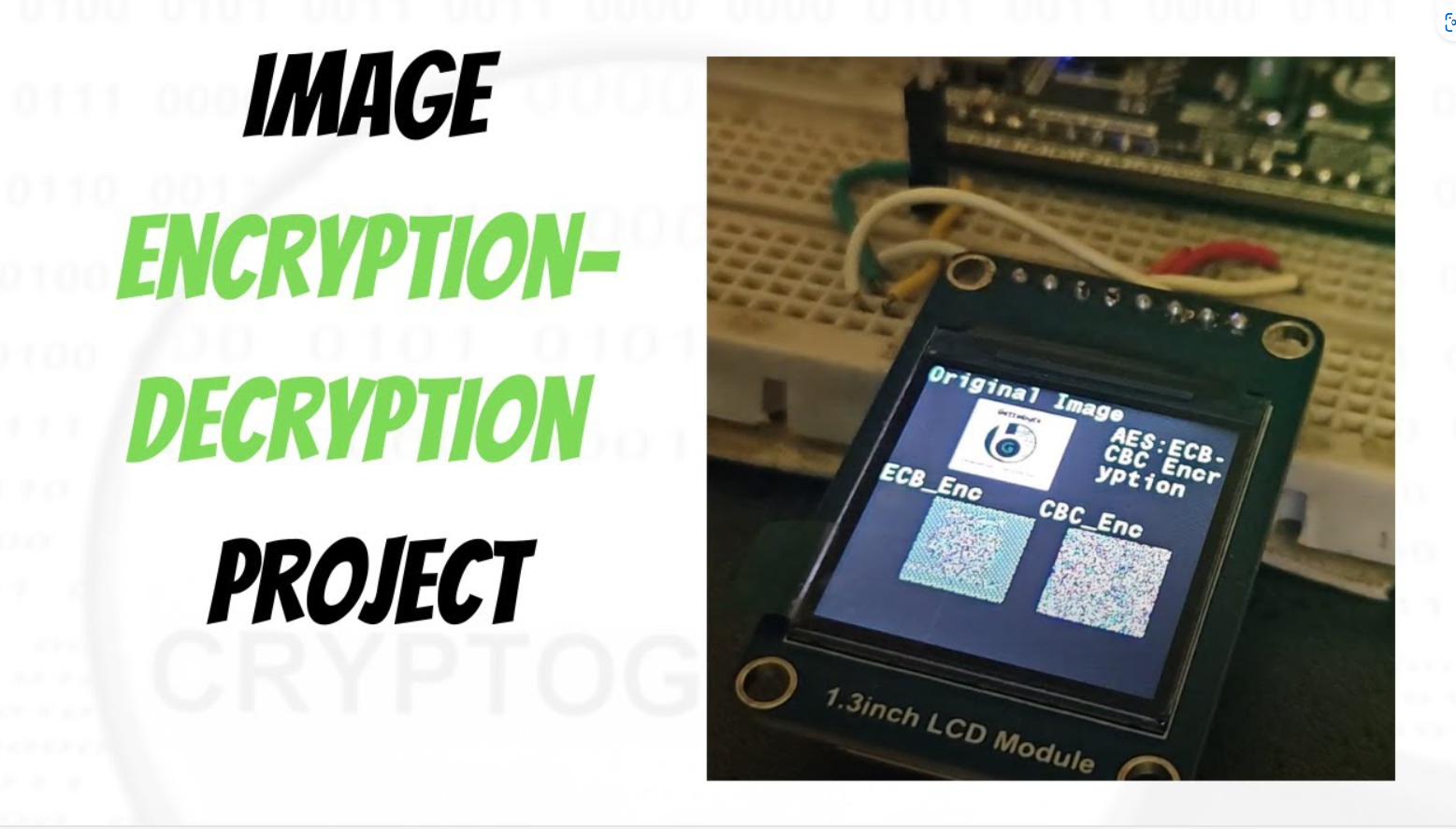
Learn Cryptography technology in embedded through DIY projects using NXP S32K144 Automotive Chips
Interfacing with the ElecronicsV2 Development Board