

- Application Layer:
- Different templates/SWC’s
- Ports:
- runnable entities:
- In this need to understand the different types of SWC’s and then understand the concept of Ports and Runnable entieties in it
- RTE Layer:
- VFB concept:
- Ports
- Interfaces
- Phases in RTE: Contact phasr and generation phas
- In this first to understand the concept of Virtual Functional Bus(VFB) and then the concept of ports on how ports are used for mapping of ASW components to BSW modules.
- BSW Layer
- Service Layer: Service layer is directly allowed to interact with Hardware
- Non Volatile Random Access Memory manager
- Diagnostic Event Manager(DEM)
- COM Stack
- Autosar OS:
- ECU -AL :
- I/O hardware Abstraction
- Communication Abstraction
- Memory abstraction and
- onBoard device abstraction
- Complex Device Driver:
- MCAL
- MCU Drivers
- memory drivers
- communication drivers
- I/O Drivers
- Service Layer: Service layer is directly allowed to interact with Hardware
- ASW layer contain the software components(SWCs), which realize the application functionality of the ECU.
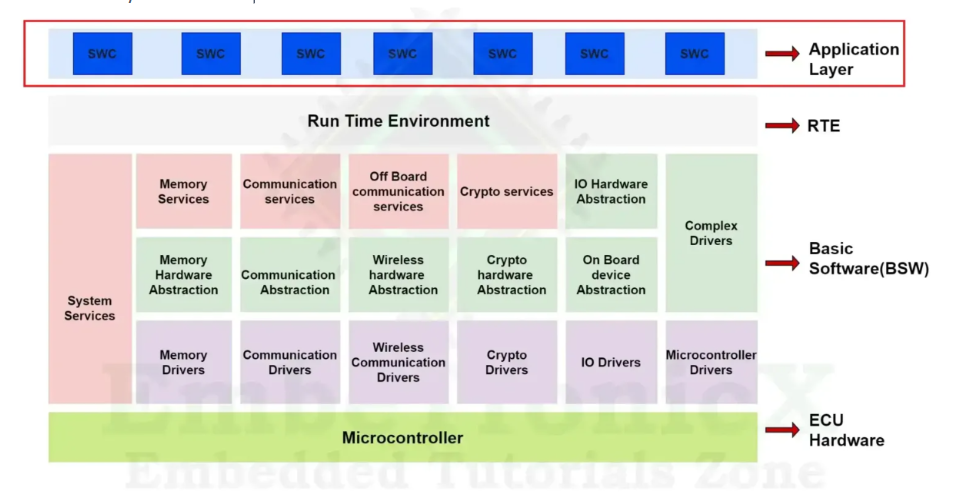
- The top layer is the application layer that consists of software components that provide various functionalities and services in the vehicle. The two most significant types are the application software component type and the sensor actuator type.
- All the SWC are portable and reusable except the hardware-dependent SWC like Sensor/Actuator SWC.
- Everything that uses the AUTOSAR platform is located in the application layer; this is the part of the system where the components actually do something useful in the vehicle.
- What are the different Software Components(SWCs) in ASW layer
- What are Software Components?
- The main purpose of the Software Components in AUTOSAR ASW layer is to make it reusability and to design a software module independent of Embedded Hardwares.
- Types of SWC’s in ASW layer:
- Application SWC
- Analog Handler SWC
- Digital Handler SWC
- Parameter SWC
- Composition SWC
- Service SWC
- Service Proxy SWC
- ECU Abstraction SWC
- Nvblock SWC
- CDD SWC
- What are these functionalities and services in the vehicle?
- What are Software Components?
- that it is also possible to deliver an ASW component only in the form of object code, forexample, in order to protect intellectual property. All necessary informatio n is ECU-independent and already available in the contract phase. With the ASW component-specific header file it is possible to compile the source code of a given ASW component. The resulting object code together with the header file can then be delivered as a bundle to the customer.
- ASW layer is also not allowed to use any BSW module directly.
- ASW components have dynamic behaviour and is implemented by “runnable entities”.
- What are runnable entities?
- Runnable entity is a part of SWC where the application behaviour logic is written. Runnable is analogous to functions in C.
- These are the smallest pieces of code (basically C-functions) which implement the SWC functionality.
- There are generally 3 types of runnables:
- Init Runnable:
- Periodic Runnable
- Server Runnable
- What are runnable entities?
- While configuring runnable developers must mention the trigger point type as well as access points, it tells under which condition the runnable needs to be triggered or called.
- What are trigger points/RTE-Events?
- The RTE-Event offers a mechanism to specify when to execute a runnable. For each runnable, an RTE Event defines whether the runnable needs to be called periodically or event-based (e.g. events related to communications like when a mode switches, when an operation is invoked, when a trigger signal is received, etc.).
- What are Ports?
- Each SWC is connected with the help of Ports, these ports give communication between 2 SWCs as well as with BSW.
- Ports are like indiviual end points in SWC’s. Through which data goes or comes inside the particular application.
- There are 2 types of Ports:
- Required Ports(R-Port): This type of port is used when data is to be received or required.
- Provider Ports(P-Port):This type of port is used when data is to be transmitted or SWC is a provider of some service to other entities.
- Ports are connected with each other via Port Interface. The kind of information these ports are handle decides the port interface. Their are 2 types of Port Interface:
- Sender Receive Interface: In this data is transferred from one software component to another software components. Data flow from SWC to SWC is done via sender reciver interface. In which Provider Port is sender and Required Port is receiver.
- Client Server Interface: In this data is tranferred from one SWC to BSW layer. Data flow from SWC to BSW layer is done via Client/erver Interface. In which Provider port is Server and Required port is Client.
- What are Port Connectors?
- Port Connectors are used to specify, the location of Ports: Their are 2 types of connectors:
- Assembly Connector: Assembly connectors are used to connect two ports in a single software component.

- Delegate Connector:Delegation connectors are used when some port of SWC needs to be exposed to the outer world of the Composition (ECU).

- Port Connectors are used to specify, the location of Ports: Their are 2 types of connectors:
- What are Access Ports?
- To access the information conveyed via the ports, The access points specify how the runnable expects to access a data (buffered or not) or an operation (synchronous or asynchronous).
- What are trigger points/RTE-Events?
- In the part aboce RTE, ASW components communicate with each other via Ports. Their is no other way of communication allowed.(e.g via shared global variable).

- ASW is mostly hardware independent(CDD modules which are used directly in ASW are hardware dependetnt only), communication between ASW and hardware( which is BSW layer) is done through RTE layer.
- This layer consists of many software components (SWC) which execute the set of tasks to fulfill the functionality of the vehicle. Each SWC contains many runnable. These software components (SWC) are connected with the help of ports. These ports give communication between two SWCs as well as with BSW.
- What are the different Software Components(SWCs) in ASW layer