



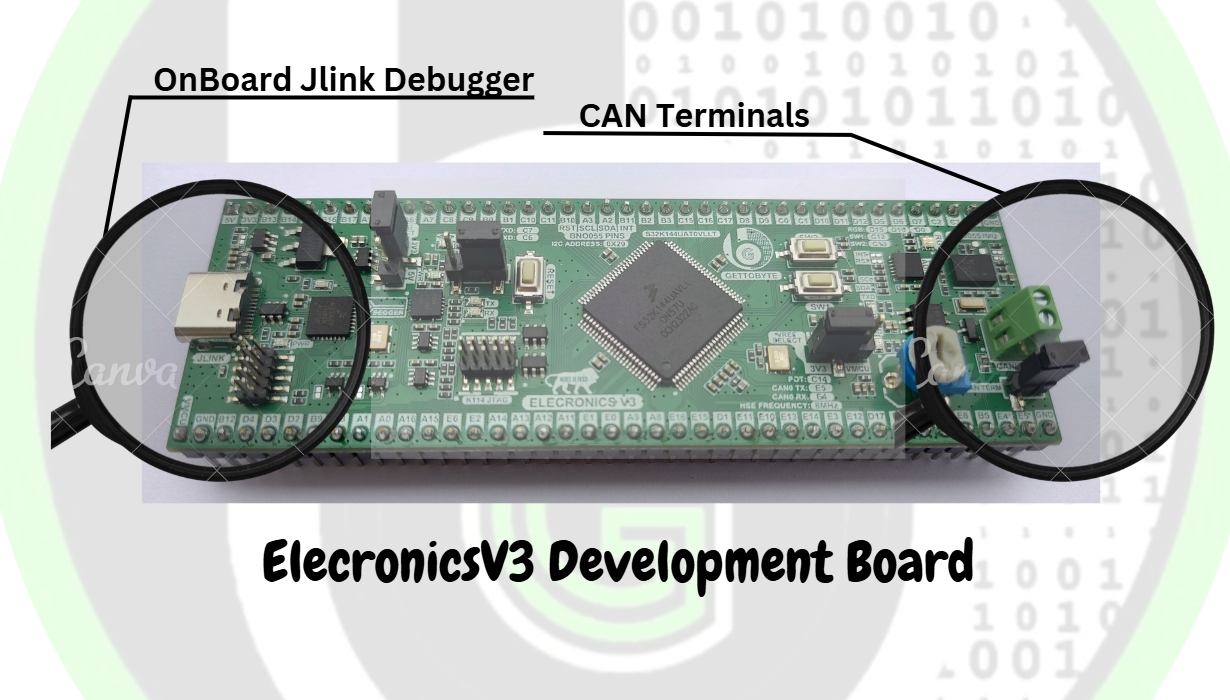
Elecronics V3 is a versatile development board based on the NXP Semiconductor S32K144 MCU. It has On-board 1*CAN channel which supports up to CAN FD protocol. Also, ElecronicsV3 has onboard Jlink Debugger to program and debug the board through Type C USB cable. Making it easy to use and hassle-free enablement to learn CAN technology. To know more about ElecronicsV3 Board, refer this page.
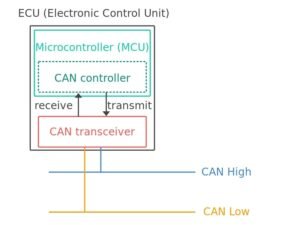
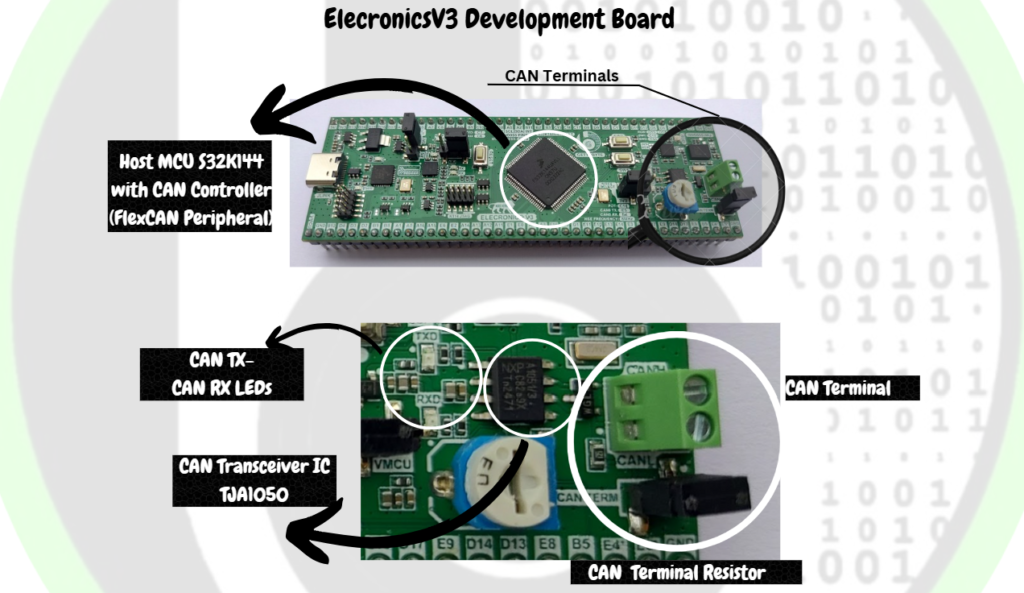
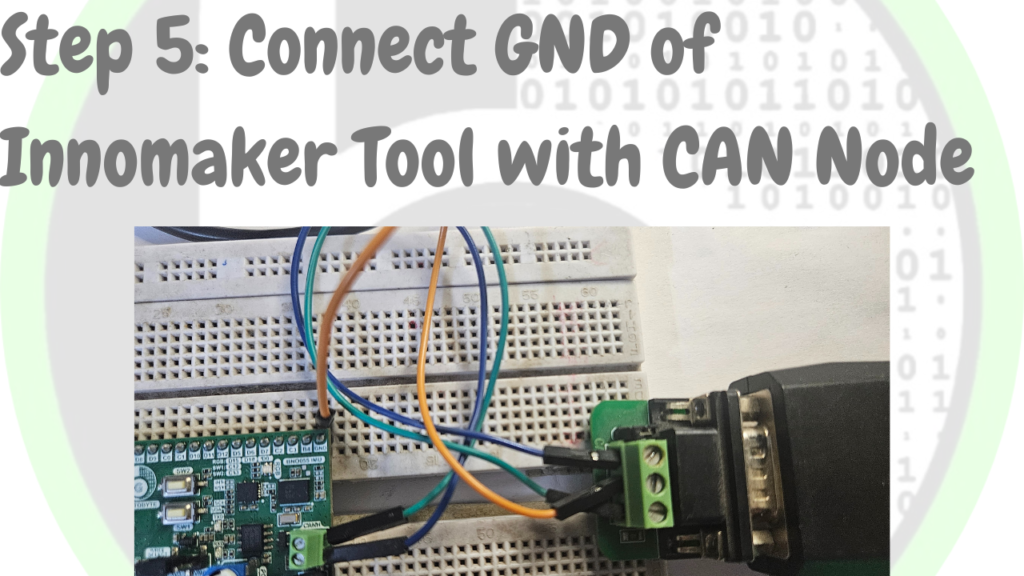
ElecronicsV3 is a complete CAN node, it has on Board Host MCU supporting CAN controller (S32K144 MCU with FlexCAN peripheral) and CAN Transceiver IC(TJA105) connected to CAN Instance 0 through PTE4(CAN-Tx) and PTE5(CAN-Rx) pins of Host MCU. And Via Green Screw terminals CAN Communication pins CAN_H and CAN_L are exposed for external node connection.

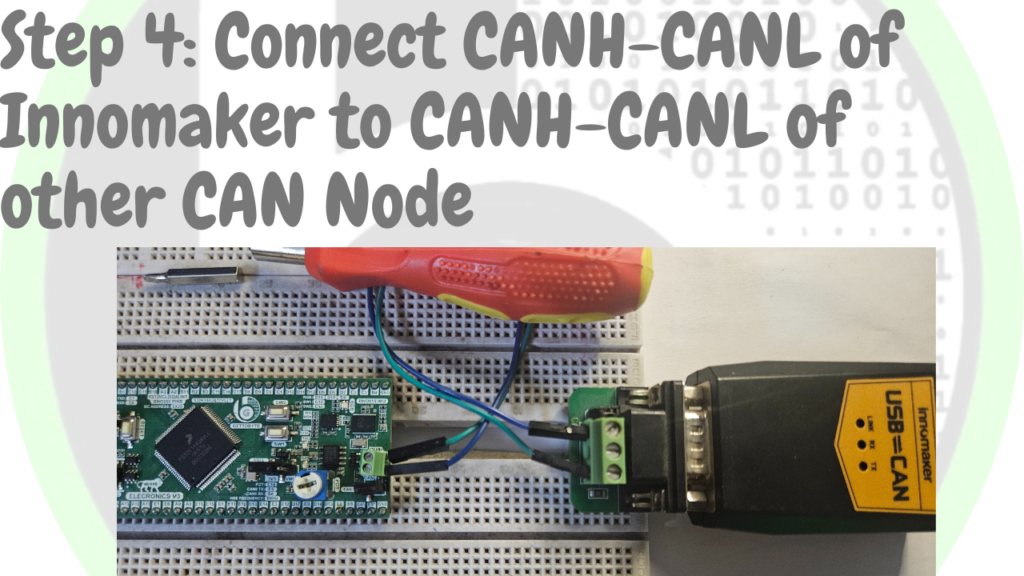
The green screw terminals, which are present on ElecronicsV3 Board would be used to connect with Other CAN nodes. In this case we will connect ElecronicsV3 green Screw terminals with Innomaker CAN analyzer tool.

We will be using CAN analyzer tool, for evaluating of CAN messages in the Desktop. It would be used to transmit and receive the CAN messages from the desktop/PC/Laptop to the CAN Node.
It is a great and must have tool while working with CAN protocol to analyzer/monitor/debug the CAN messages. CAN analyzer tool act as a bridge to communicate between a CAN Node and Desktop via CAN protocol. While learning CAN protocol and doing Handson practical projects, having a CAN Analyzer tool is must and important electronic tool to procure which will help learners to study and capture CAN messages easily.
How to use the CAN Analzyer tool?
To use the CAN Analyzer tool, there would be 2 things. CAN Analyzer Hardware tool and CAN Analyzer Software application.
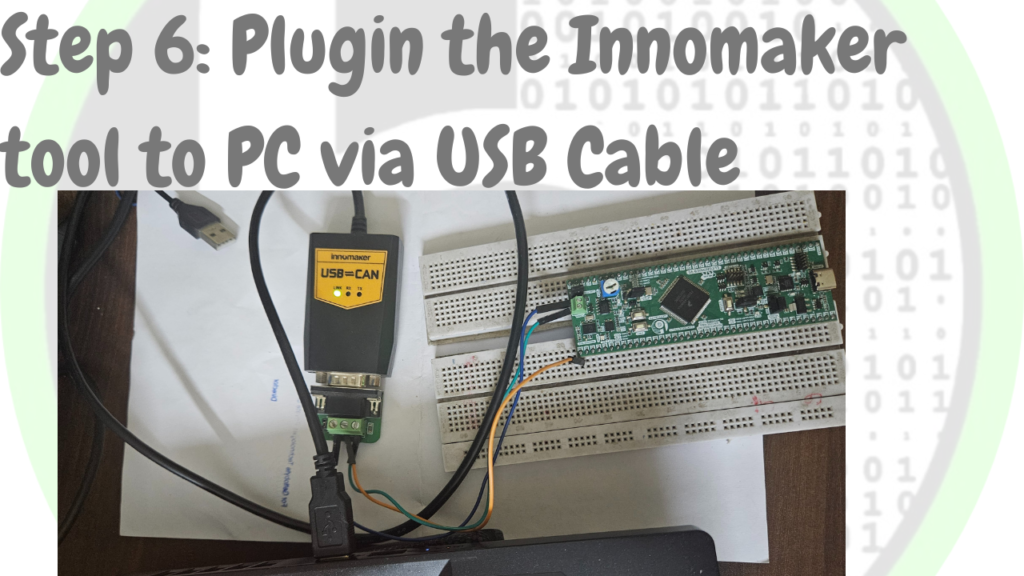
- CAN Hardware tool would be used to physically connect with the CAN Node through CAN_H-CAN_L pins and with the Host PC through USB cable.
- CAN Software application would be used to see and analyze the CAN messages on the Desktop
Which CAN analyzer tool to use?
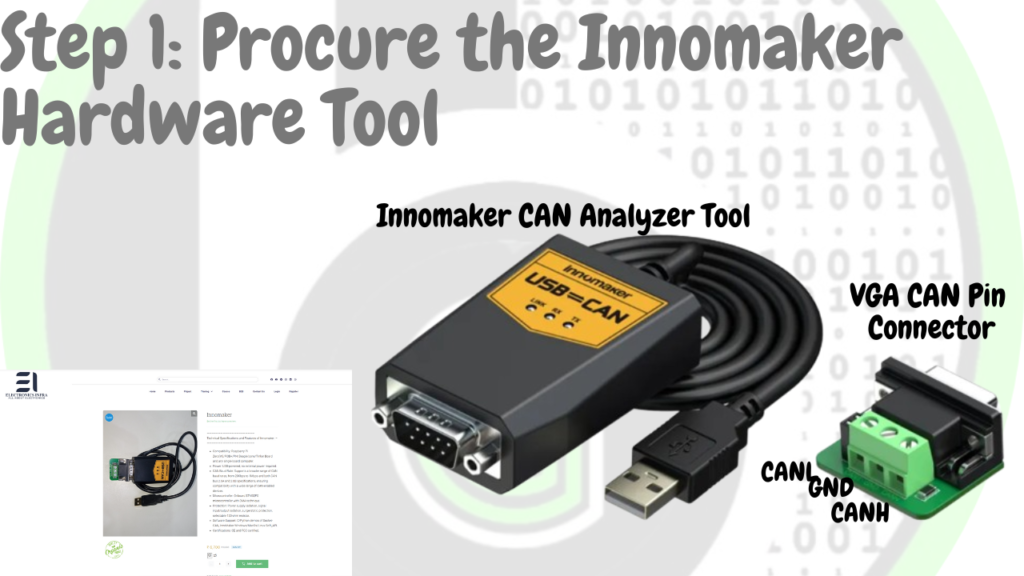
There are many CAN analyzer tools available, but they are quite expensive the industrial grade CAN analyzer tools like that of Vector, Peak and etc starts from 30-40K minimum. So, we are going to use Innomaker CAN Analyzer tool which is cost effective as compared to other tools(Comes at 6-7K) and also very easy to use. Buy Link of Innomaker Hardware tool is here.

Connections of Innomaker CAN analyzer tool!
To use the Innomaker CAN Analyzer tool, we would be needing Innomaker Hardware and Innomaker software( This is covered in next section)
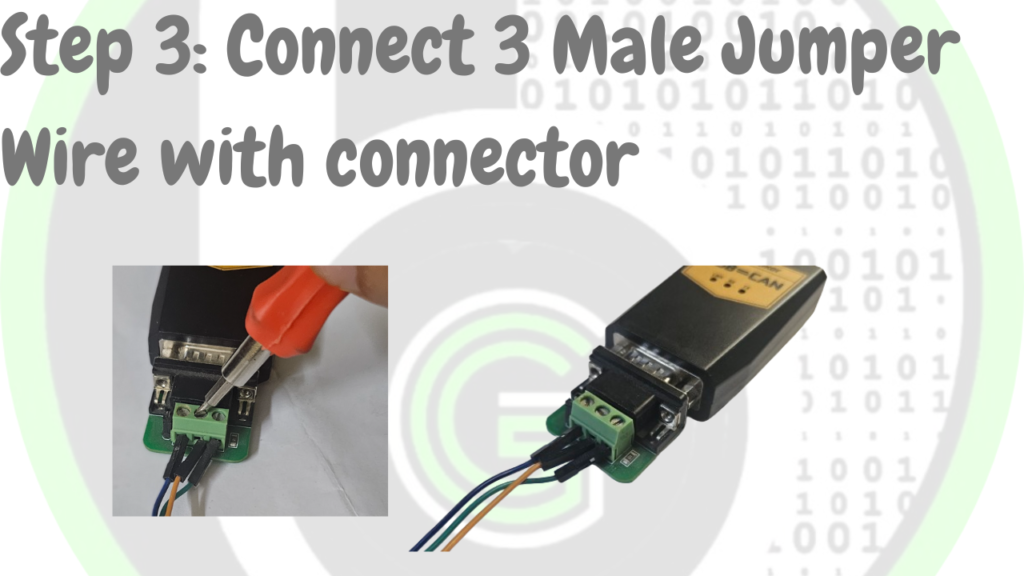
CAN Innomaker Hardware tool connections: When you receive the Innomaker hardware tool, there would be 2 parts in it Innomaker hardware tool and VGA CAN Pins connector. Just connect these 2 and attach male to male jumper wire on its screw terminals. And then connect these Jumper wires to the CAN pins of the CAN node.

To understand nitty gritty details of the Demo codes and how to run the demo codes so as to see the desired output. Enroll the course on ” CAN Protocol Handson Using Automotive MCU”.
In the Course we have taught above stated demo examples with in detail code explanation, code configuration tool generation, how to debug and see the desired output, Important API’s of FlexCAN module which are used for doing CAN communication.
This course is perfect blend of theoritical knowledge with practical learning to make users aware about nitty gritty details and important concepts of CAN controllers which plays very important part to use CAN technology, but hardly people knows about.

The course is priced at INR 2053. The course content is rare to find and covers niche topics of CAN Technology. To know more about this course, explore the course page at edu.gettobyte.com.