






Blog
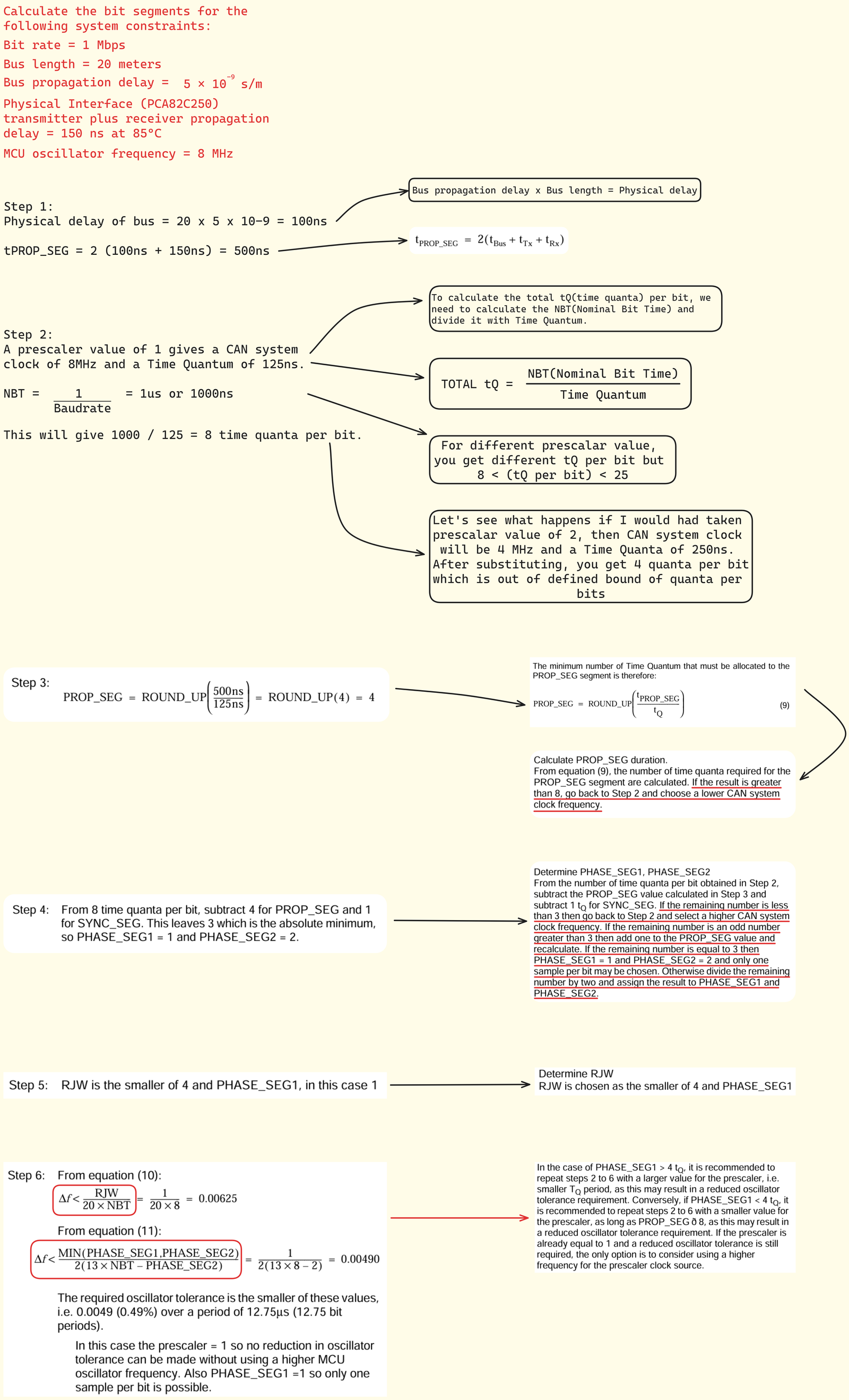
Introduction to CAN Communication
Basics About CAN technology and communication protocol || CAN frame formats || CAN protocol types and architecture
Blog
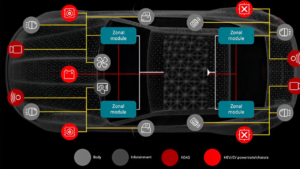
What is E/E Architecture in Automotive
Ever Though how electronics is implemented and arranged in a vehicle???? Explore this blog to get the Answer| ||| What is E/E Architectute || Domain Architecture || Zonal Architecture
What are functional domains in automotive and their different types?
Now in This blog, we are going to dip deeper into different electronics sub-systems in an automotive vehicle.