In S32K144 MCU, I2C protocol can be used via 2 peripherals: LPI2C & FlexIO.
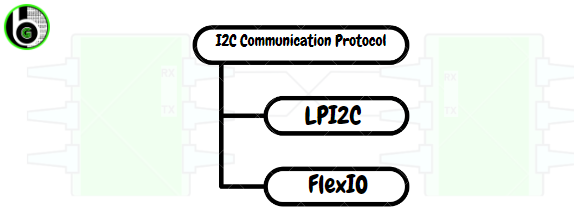
LPI2C is referred as Low Power Inter Integrated Circuit. LPI2C is on chip peripheral only to do I2C communication protocol. I2C is a serial protocol which is done via I2C supported peripherals in the Microocntrollers.
Also, in S32K144 there is FlexIO peripheral through which on-board serial communication protocols like UART, I2C & SPI can be emulated. So through FlexIO peripheral, also I2C peripheral can be implemented. To know about FlexIO peripheral in S32K144, refer to this blog.
Features of I2C via LPI2C peripheral in S32K144 MCU:
- LPI2C supports standard-mode, fast -mode , fast-mode plus and ultra -fast modes of operation
- High Speed Mode(HS) in slave mode.
- Multi-master support, including synchronization and arbitration. Multi-master means any number of master nodes can be present.
- Clock stretching support.
- Slave addressing via 7 bit( upto 2^7 slaves can be connected at same I2C lines) and 10 bit(upto 2^10 slaves can be connected at same I2C lines).
- Support of DMA and Interrupts for both I2C master & slave.
- LPI2C also has Support of System Managment Bus Specification, version 2(SMBus), it is used for design of Smart Battery System.
Features of LPI2C master:
- Transmit and Receive FIFO of 4 words.
- Transmit FIFO can initiate START and STOP conditions for starting I2C communication. As I2C master always initiate the communication session.
- Flag and interrupts signal to Start Signals, STOP signals, loss of arbitration, unexpected NACK and command word errors.
Features of LP12C Slave:
- There are registers for configuring address if MCU is used as I2C slave. This is done so as to minimize software overhead because of master/slave switching.
- Software-controllable ACK or NACK.
- Flag and interrupt signals for end of a packet, STOP condition or bit error detection.
LPI2C Pinout and Hardware Instances
LPI2C peripheral in S32K144 has 1 instance: LPI2I2C0
In S32K MCU, LPI2C peripheral can be used in 4 wire schemes & 2 Wire Scheme. For this blog we are going to focus on 2-wire scheme. To know about 4-wire scheme, refer to this blog.
All The LPI2C Instances has 5pins, instead of traditional 2 pins:
- SCL (Serial Clock): It is used as SCL pin in 2-wire scheme.
- SDA (Serial Data): It is used as SDA pin in 2-wire scheme.
- HREQ (Host Request): If host request is asserted and the I2C bus is idle, then it will initiate an LPI2C master transfer.
- SCLS (Secondary I2C clock line): Not used in 2 wire scheme.
- SDAS (Secondary I2C data line): Not used in 2-wire scheme.
S32K144 I2C Pins
Each LPI2C instance in S32K144 supports all the 2 pins, with below mentioned pin details. Refer to this blog to know about Pins Signal description in S32K144 MCU
In LPI2C0 there are following number of pins:
- For SDA there are 2 MCU pins.
- For SCL there are 2 MCU pins.

LPI2C0 Pins in S32K144
In a MCU a single pin can work as multiple function, so we have to configure that which function we need, accordingly pins have to be configured. This configuration of Alternate functions of pins in S32K144 MCU is done by Signal Multiplexing peripheral. One can configure which pin to use for LPI2C, via Signal Multiplexing peripheral, in which there is a register Pin Control Register (PCR) which has Pin Mux Control bits(MUX) for configuring the alternate functions of the pins.
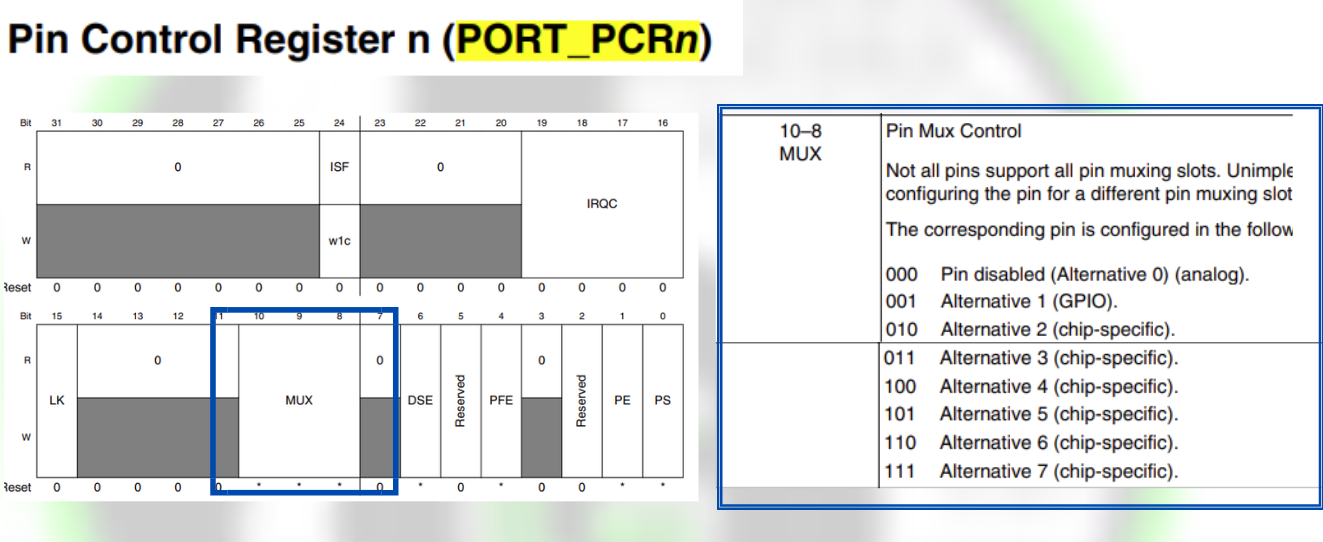
For example, we are using LPI2C0. Now in LPI2C0 for using SCL-SDA pins one can configure PTA3-PTA2 pins:
- You can see SSS column in the excel in that for PTA3 under LPI2C0_SCL has value of 0000_0011. Last 3 bits of this value represents the MUX values to be configured for configuring PTA3 pin as LPI2C0_SCL pin, in PORT_PCRn register.
- You can see SSS column in the excel in that for PTA2 under LPI2C0_SDA has value of 0000_0011. Last 3 bits of this value represents the MUX values to be configured for configuring PTA3 pin as LPI2C0_SDA pin, in PORT_PCRn register.
This part of LPUART pins configuration is done internally by S32 SDK/pin driver (Its detail overview is in GPIO Peripheral in S32K144 MCU). When writing the code, we just need to configure the structure g_pin_InitConfig in which. mux member for the corresponding MCU pin will be assigned value according to last 3 bits of SSS column, as shown below and pass that structure in PINS_DRV_Init().
LPUART SDK
S32K SDK/drivers provide an easy to use and quick way to use the LPI2C peripheral in S32K144, which is known as LPI2C SDK.
Each S32 SDK driver can be configured and enabled to use in the project via S32 Configuration Tool. Will be digging into that part, in next section. For now, let’s understand the LPI2C SDK in some detail, so as to use I2C peripheral via LPI2C.
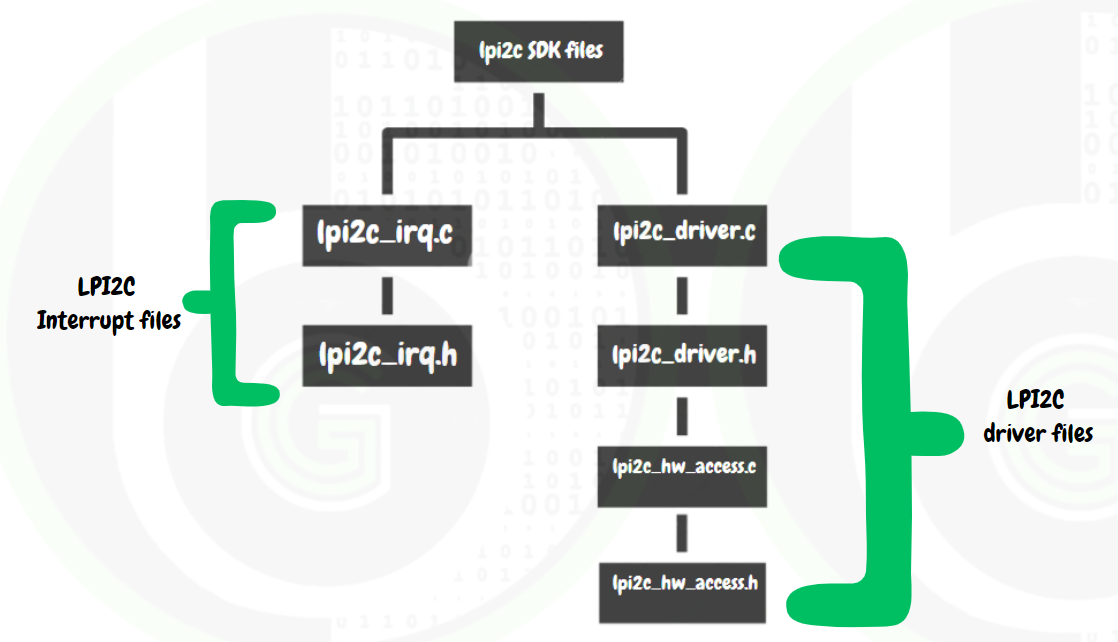
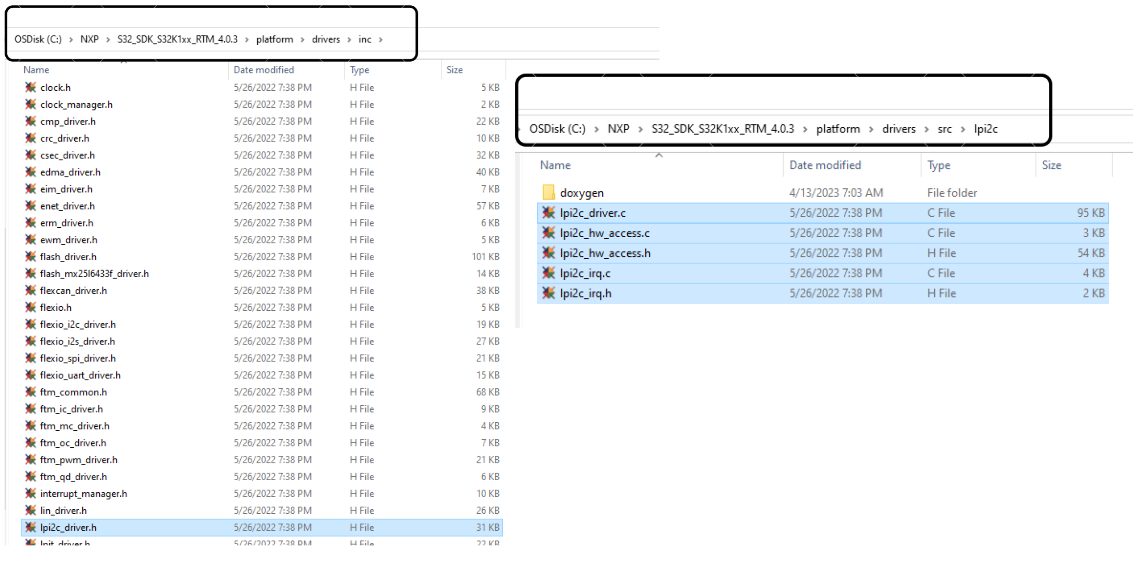
In the SDK of LPI2C there are header and source files for LPI2C Driver and LPI2C Interrupt
- LPUART interrupt files contains functions for using &configuring of LPUART interrupts and IRQ handler in S32K144 MCU.
- LPUART driver files contains functions for using/configuration of LPUART Peripheral.
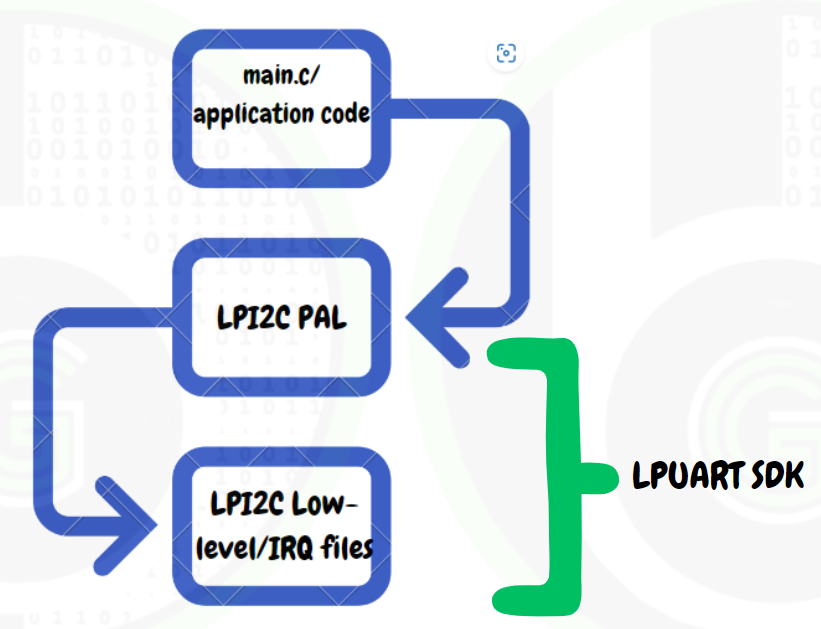
LPI2C Driver
LPI2C driver files are further divided into LPI2C Peripheral Abstraction Layer(PAL) & LPI2C Low Level drivers, as shown below:
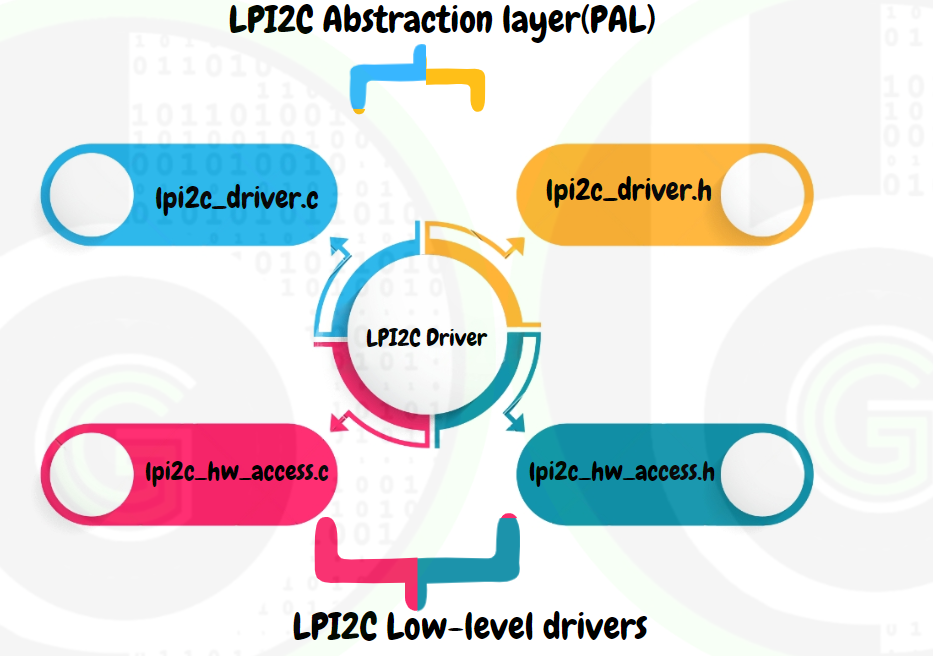
- LPI2C Peripheral Abstraction Layer(PAL): contains functions and variables that are directly used in main.c or application code. And internally these functions use the LPI2C Low-level drivers & LPI2C IRQ. So if hardware is changed LPI2C PAL would remain same and only internal low-level driver files need to be changed or modified. By this way we don’t have make many changes on application level.
- LPI2C Low-level driver: contains functions that configures the LPI2C peripheral registers for initializing the peripheral, using the peripheral and processing the data of peripheral at hardware level. These files are the ones which actually interacts with the hardware and make it configurable to our needs.