–> FTM(FlexTimer Module) is a peripheral that offers multiple functionalities: Input Capture mode(for recording input signal timing for frequency or duty cycle measurement), Output Compare(triggers events at specific timer counts for precise signaling), and PWM Generation(creates adjustable PWM signals for motor speed and power control). Our main focus will be on PWM Generation. The first question that comes to mind is “What is PWM?, and Why generate PWM?”.
–> What is PWM?
PWM or Pulse Width Modulation is a technique for controlling analog devices using digital signals. In PWM, the signal rapidly alternates between high (on) and low (off) states, creating a square wave. By adjusting the “on” duration, or duty cycle, we can effectively control the average power supplied to a device.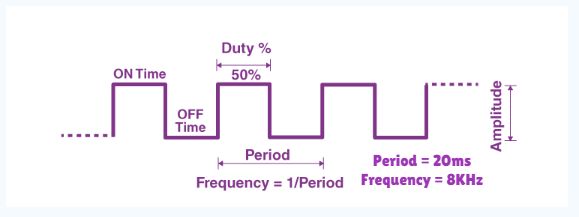
–> Why generate PWM?
PWM is essential in applications where precise control over power or speed is needed without complex hardware. For example, it’s widely used for controlling motor speed, LED brightness, and even power to heaters.
–> Important Terminology before Operating PWM
- Amplitude represents the peak voltage level of the signal.
- Duty Cycle is the percentage of time the signal remains high within one cycle, controlling how much average power is delivered to the device(If power output is 5 watts but with 50% duty cycle then power delivered will be 2.5 watts only).
- Frequency is the rate at which each cycle repeats, affecting how quickly a device responds, which is critical in motor control and other real-time applications. To calculate each cycle, just reciprocate and you get the Period of the signal.
–> After all this, only one thing is left which is”How is PWM generated”.
The first and most important thing to know is that the FTM peripheral is a counter-based timer peripheral that relies on the counters for PWM signal generation. there are 3 types of counters in the FTM peripheral that are responsible for setting period and frequency, let’s name them MAX Counter, THRESHOLD Counter, and VARIABLE Counter.
- MAX Counter (used to set the PWM period),
- Threshold Counter (defines the duty cycle), and
- VAR Counter (increments to trigger pin changes).
–> Cycyle of PWM Generation
Initialization and Counters Setup:
- MAX Counter: This counter is set to a specific value representing the full period of the PWM signal. For example, if MAX is set to 1000, the PWM period will complete after the counter reaches 1000.
- Threshold Counter: This is set to a value less than the MAX counter, controlling the duty cycle. For instance, setting the Threshold to 500 with a MAX of 1000 results in a 50% duty cycle.
- VAR Counter: This counter counts up from 0, incrementing with each clock pulse, to form the basis of the PWM timing.
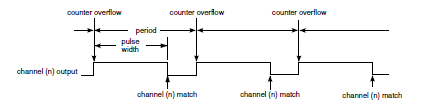
PWM Signal Generation Cycle:
- Counter Starts: When the PWM is initiated, the VAR counter begins incrementing from 0. As it counts, the microcontroller pin initially remains low.
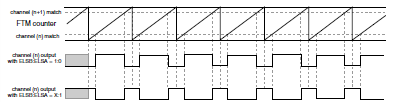
- Threshold Reached (Pin Toggled High): When the VAR counter matches the Threshold value, the FTM toggles the configured output pin high. This high state will persist until the VAR counter reaches the MAX value.
- MAX Counter Reached (Pin Toggled Low): When the VAR counter reaches the MAX counter value, the output pin is toggled low again, marking the end of the PWM cycle. The VAR counter then resets to 0, starting a new cycle with the same timing and pin changes.
Continuous PWM Waveform:
- With each cycle, this process repeats, creating a series of high and low states on the output pin. The duration of the high state relative to the period defines the duty cycle, which adjusts how much time within each period the signal remains high.
- By changing the Threshold value while keeping MAX constant, the duty cycle can be adjusted dynamically. For example, increasing the Threshold to 750 with a MAX of 1000 would create a 75% duty cycle, increasing the average output voltage.
Resulting PWM Signal and Control:
- This generated PWM waveform can be fed to devices like LEDs, motors, and MOSFETs to control their operation. The high time (duty cycle) determines the average power delivered: a higher duty cycle means more power and, for example, greater motor speed or LED brightness.
Now, we’ll move towards the feature of PWM.
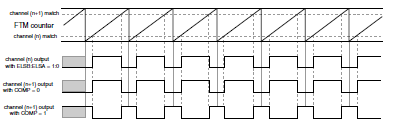
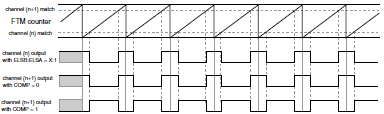
2. Channel Modes