PDB (Programmable Delay Block) Peripheral in automotive microcontroller (NXP S32K144)
What is Programmable Delay Block(PDB) peripheral? PDB provides controllable delays from either an internal or an external trigger, or a
What is Programmable Delay Block(PDB) peripheral? PDB provides controllable delays from either an internal or an external trigger, or a
Add Your Heading Text Here
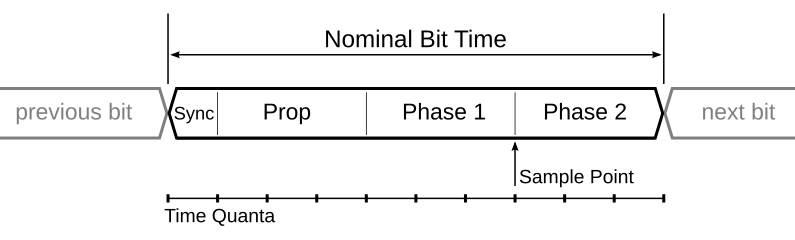
Discover how CAN bit timings are calculated for CAN Nodes while using CAN Technology. Knowledge of synchronization between ECU’s while doing Controller Area Network Communication.
Basics About CAN technology and communication protocol || CAN frame formats || CAN protocol types and architecture

ADC peripheral in S32K1xx MCU? ADC peripheral introduction in S32K1xx MCU? Features and specifications of ADC peripheral. Interlinking of PDB and TRGMUX with ADC peripheral

Dwell into this blog to know how to do CAN communication with automotive microcontroller. Start your journey to learn CAN communication protocol with simple DIY project using ElecronicsV3 board and CAN analyzer tool

CAN Driver of Autosar MCAL layer Explanation, Understanding and tutorial using ElecronicsV3 Development board

FlexCAN Driver of CAN Peripheral in NXP S32K1xx and S32K3xx MCU’s, Understanding and tutorial using ElecronicsV3 Development board