A Deep Dive into SHE Key Slots for Automotive Microcontrollers
In the realm of automotive cybersecurity, microcontrollers must support secure storage, cryptographic operations, and boot integrity. To meet these requirements,
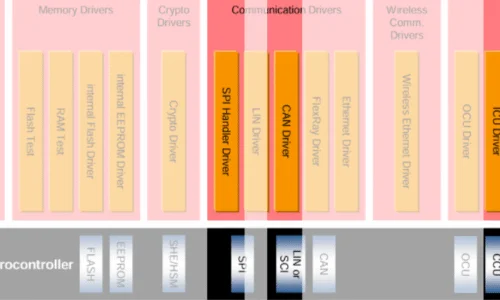
How to do CAN Communication using Automotive Microcontroller S32K144 via ElecronicsV3(Non-Autosar Driver)
Dwell into this blog to know how to do CAN communication with automotive microcontroller. Start your journey to learn CAN communication protocol with simple DIY project using ElecronicsV3 board and CAN analyzer tool
Looking to learn Autosar Software Tech Stack?? Autosar MCAL Layer is the easiest and inexpensive way to start learning your automotive software journey that too with Handson DIY projects and not just theoretical way
Get Started with NXP S32K144EVB for Automotive and Industrial Applications. MCU features, Board features, PinOut, SDK and IDE installation with debugging
Autosar MCAL layer ADC Driver API’s and data types explanation
API name: Adc_Init() void Adc_Init (const Adc_ConfigType* ConfigPtr) Role: Adc_Init() API initializes the ADC peripheral of the microcontroller. This API
A Deep Dive into SHE Key Slots for Automotive Microcontrollers
In the realm of automotive cybersecurity, microcontrollers must support secure storage, cryptographic operations, and boot integrity. To meet these requirements,
How to do CAN Communication using Automotive Microcontroller S32K144 via ElecronicsV3(Non-Autosar Driver)
Dwell into this blog to know how to do CAN communication with automotive microcontroller. Start your journey to learn CAN communication protocol with simple DIY project using ElecronicsV3 board and CAN analyzer tool
Looking to learn Autosar Software Tech Stack?? Autosar MCAL Layer is the easiest and inexpensive way to start learning your automotive software journey that too with Handson DIY projects and not just theoretical way
Get Started with NXP S32K144EVB for Automotive and Industrial Applications. MCU features, Board features, PinOut, SDK and IDE installation with debugging
Autosar MCAL layer ADC Driver API’s and data types explanation
API name: Adc_Init() void Adc_Init (const Adc_ConfigType* ConfigPtr) Role: Adc_Init() API initializes the ADC peripheral of the microcontroller. This API
Tigger MUX Control(TRGMUX) Peripheral in S32K144 MCU
What is TRGMUX peripheral? TRGMUC provides an extremely flexible mechanism for connecting various trigger sources to multiple pins/peripherals. The trigger
ADC peripheral in S32K1xx MCU? ADC peripheral introduction in S32K1xx MCU? Features and specifications of ADC peripheral. Interlinking of PDB and TRGMUX with ADC peripheral